香港理工大學的最新研究卻顯示,驟旱風險正日益增加,並發現在氣候變化的影響下,驟旱現象在中國南方及世界多個地區形成的速度有加快的趨勢。由於城市往往有較明顯的熱島效應,驟旱對香港等城市化地區,或造成更嚴重的威脅。
資料圖片
理大研究發現,長三角至海南省一帶的中國東南區域,面對快速乾旱的風險較高。普通旱情需時5至6個月甚至更長的時間醞釀,始達到最大的強度。但在2000年至2020年期間,5日之內形成的驟旱,佔同期所有驟旱的比例上升達18.67%。
點擊看圖輯
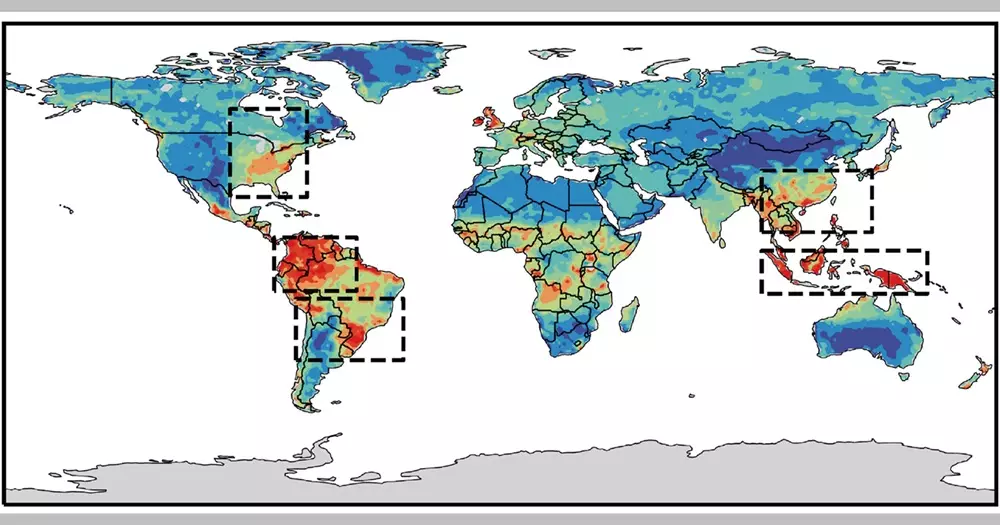
團隊發現,土壤水分枯竭和大氣乾旱較多同時出現的地區(虛線標示區域),更容易觸發土壤濕度急劇下降,形成驟旱多發。理大圖片
理大研究指驟旱現象形成速度加快 對香港或有更嚴重威脅

設計圖片
帶領研究的理大土地測量及地理資訊學系助理教授王碩說,驟旱的特點是迅速在一個月內形成,而且土壤的水分枯竭得很快,意味著早期預警的指標較少,影響對抗旱情的準備工作,甚至令農作物和社會承受較普通旱情更嚴重的打擊。驟旱形成時通常伴隨氣溫較平均溫度高及降雨不足,從而引發例如驟旱和熱浪同時出現的複合極端氣候現象。由於城市往往有較明顯的熱島效應,驟旱對香港等城市化地區,或造成更嚴重的威脅。
團隊發現,土壤水分枯竭和大氣乾旱較多同時出現的地區(虛線標示區域),更容易觸發土壤濕度急劇下降,形成驟旱多發。理大圖片
團隊綜觀全球過去21年曾出現的驟旱,綜合發展時間尺度以及迅速發展的成因,讓政策當局和受影響人士更了解驟旱的風險,並推動驟旱預報和預警系統的創新研發。根據人造衛星對土壤水分監測,在過去21年間,全球出現過的驟旱事件中,多組數據分析顯示有大約33.64至46.18%在5天內形成;佔同期所有驟旱事件比例,上升3.23至19.03%。結果顯示在世界大部分地區,驟旱雖然不是發生得更頻繁,卻是在更短時間形成。此類惡劣氣候現象多發生在潮濕和半濕潤地區,包括東南亞、東亞、亞馬遜盆地、北美東部和南美南部。因高溫、少雨和高水汽壓差導致的大氣乾旱情況,容易引發驟旱。土壤水分下降伴隨着飽和水汽壓差增大,並通過陸—氣反饋加速土壤濕度下降。因此,陸—氣相互作用強烈的中國東南區域較容易發生驟旱。

理大研究指驟旱現象形成速度加快 對香港或有更嚴重威脅
與傳統的、緩慢發展的旱情相比,驟旱隨着土壤水分快速消耗而演變,可能導致生態系統和農業系統的失衡。2012年夏季出現的驟旱,就對美國中部的玉米農作物做成估計約357億美元損失。王碩提出,各地政府和公眾應在常見的極端氣候現象之外,意識到日益增加的驟旱風險,並採取措施應對氣候變化引發的新型天災,亦有必要改良傳統旱災監察系統和指標,及時掌握急劇演變的驟旱情況。

設計圖片
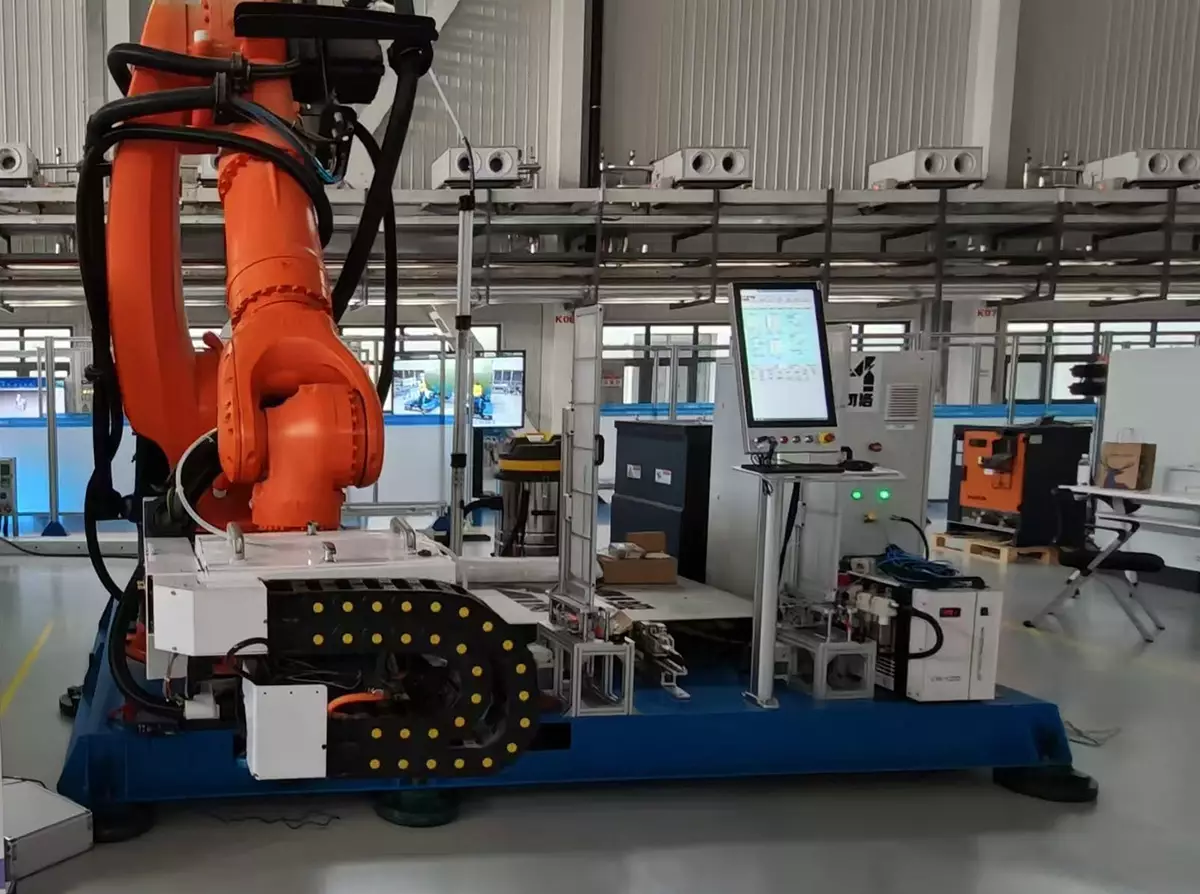
工業 5.0 時代的核心在於人機協作,香港理工大學(理大)科研團隊在此領域取得創新突破,研發出新一代「人機共生」協作製造系統,不僅能實時感知複雜環境、準確解讀操作人員意圖,更能通過簡單示教學習,完成技能遷移和自動學習,並實現自主的工藝代碼生成與高準確度任務執行的自動調節,已成功應用於大型飛機自主製孔、電動車電池拆解等高端製造任務,為業界打造「人本智能製造」新模式奠定重要基石。
人機之間的協同運作,旨在結合人類的靈活應變與適應能力,以及機器的高精準度與穩定性,發揮各自最大價值。這套「互相認知人機協作製造系統」,由理大黃鐵城智能機器人學青年學者、工業及系統工程學系副教授鄭湃教授及其科研團隊開發,一改傳統倚賴預編程設計,以整體場景理解為核心,通過收集及分析視覺、觸覺、語言及生理信號等多模態感知訊息,實現高準確度與全方位的環境分析,並可自主作出決策及靈活執行任務。
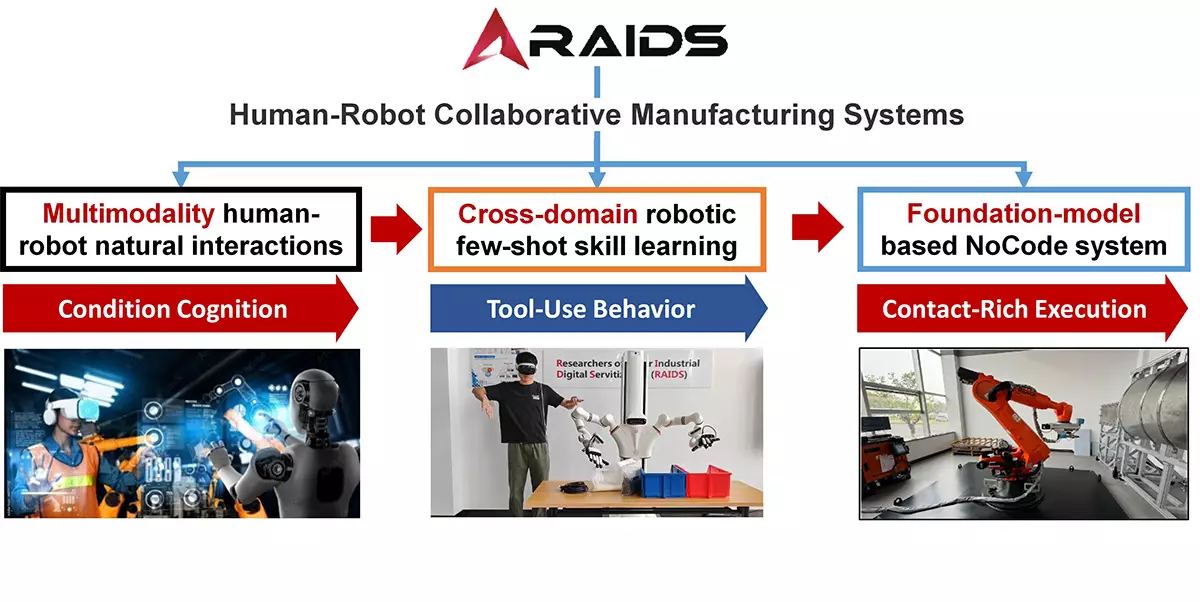
該「互相認知人機協作製造系統」能支援機器人執行情境認知、工具調用及密集接觸,完成複雜任務。
該新系統具備先進的機器學習與三維場景感知能力,兼具效率與安全性,大大促進了人與機器人在複雜製造場景中的流暢互動。透過產業合作項目,團隊已為多家領先企業量身打造人機協作系統,並成功於多種場景落地,主要涉及精密或複雜的工序。
鄭教授表示:「全球製造業轉型都正追求人機共生模式,看重更具彈性的自動化效能。我們的研究旨在構建一種嶄新人機協作架構,提供具有多模態自然感知、跨場景技能遷移、域模型自主執行的智能機器人製造系統,使機器人不再只是工具,而是能與操作人員同步演進的智能體,為智慧工廠突破基於預編程的自動化手段提供新方案。」

研究構建了一種嶄新人機協作架構,可因應應用場境打造不同的智能機器人製造系統,輔以頭戴式裝置後更能夠提供實時數據擷取,為操作人員提供即時、直觀的引導。
半結構化、非結構化生產場景,例如個性化產品製造,通常涵蓋大規模、複雜的產品組裝、拆解與檢測流程,要求高認知及快速適應能力。研究團隊引入新穎的「視覺語言導引」規劃架構,融合大型語言模型、深度強化學習等前沿人工智能技術,輔以混合實境(MR)頭戴式裝置,提升應對個性化與其他不可預測生產任務的能力。

研究構建了一種嶄新人機協作架構,可因應應用場境打造不同的智能機器人製造系統,輔以頭戴式裝置後更能夠提供實時數據擷取,為操作人員提供即時、直觀的引導。
該架構關鍵創新在於結合了視覺語言導引的目標分割模型,以及由語言指令驅動的任務規劃方法,令系統能整合視覺資訊與語言指令,協助機器人掌握複雜任務語意及識別動態場景,從而與操作人員高效協作。其中,頭戴式裝置能夠提供實時數據擷取,為操作人員提供即時、直觀的引導,亦革新了人機互動介面。
鄭教授強調:「未來智能製造的發展方向不是讓機器變得更聰明去取代人類,而是在人與機器共同學習、調適與成長的模式中,創造出更高的生產力與靈活性。為滿足此發展需求,下一代機器人械臂需具備在人類引導下持續學習與優化的能力,才
能實現高效且自然的人機互動。」
研究構建了一種嶄新人機協作架構,可因應應用場境打造不同的智能機器人製造系統,輔以頭戴式裝置後更能夠提供實時數據擷取,為操作人員提供即時、直觀的引導。
為進一步推動人機協作系統的進步,鄭教授將帶領研究團隊深入探索多個關鍵技術,包括具自我組態能力的人機網絡、技能轉移機制,以及自主多智能體的任務執行方式,建構「深度人本」的智能製造系統,並拓展至更多重要領域,令社會邁向一個由科技賦能、具同理心與人性導向的智能新世代。

理大黃鐵城智能機器人學青年學者、工業及系統工程學系副教授鄭湃教授(前排中)帶領科研團隊開發的「互相認知人機協作製造系統」,能實時感知複雜環境、準確解讀操作人員意圖,並自主作出決策。項目亦
瑞典皇家理工學院可持續製造系講座教授及國家卓越生產研究中心主任王力翬教授(前排右)合作。
鄭湃教授一直致力研究「人機共生」協作製造系統,並獲選 2024 年度國家自然科學基金的「優秀青年科學基金項目」。鄭教授帶領 RAIDS 科研團隊進行以上研究項目,詳情:https://www.raids.group/