香港理工大學 (理大) 科研團隊在智能材料領域取得革命性突破,成功研發出可在人體安全磁場下,靈活變形並調控機械特性的柔軟磁流變紡織品。該物料以電力驅動、支持編程控制,同時兼具輕量、柔韌和透氣的紡織特性,可廣泛應用於智能穿戴、柔性機械人、虛擬實境 (VR) 和元宇宙虛擬觸感體驗等領域。
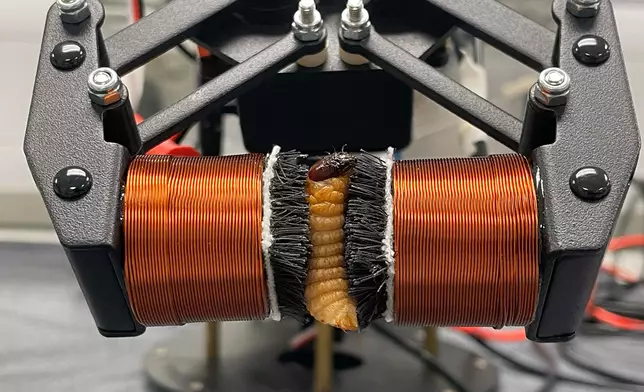
這種軟磁聚合物複合纖維以電力驅動、支持編程控制,同時兼具輕量、柔韌和透氣的紡織特性。
傳統磁流變材料長期受制於兩大瓶頸:磁粉笨重和高強度磁場對人體健康構成潛在風險。帶領該研究的理大智能可穿戴系統研究院院長、吳文政及王月娥紡織科技教授兼時裝及紡織學院紡織科技講座教授陶肖明教授指出:「研究團隊的核心目標是打破傳統磁流變技術的應用局限,拓展至纖維形式,既具精準智能調控,又能兼容紡織材料輕柔透氣的特性。」
點擊看圖輯
這種軟磁聚合物複合纖維以電力驅動、支持編程控制,同時兼具輕量、柔韌和透氣的紡織特性。
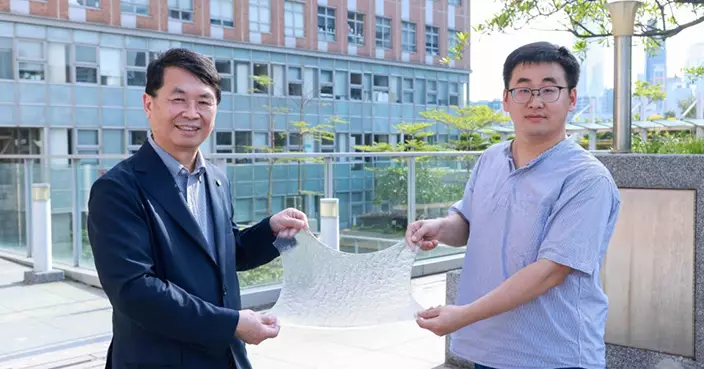
香港理工大學陶肖明教授(左)及蒲俊宏博士(右)帶領的研究團隊研發可在人體安全磁場下靈活變形並調控機械特性的柔軟磁流變紡織品
研究團隊利用這種具備獨特方向性可控反應能力的嶄新纖維開發了多種創新物料。
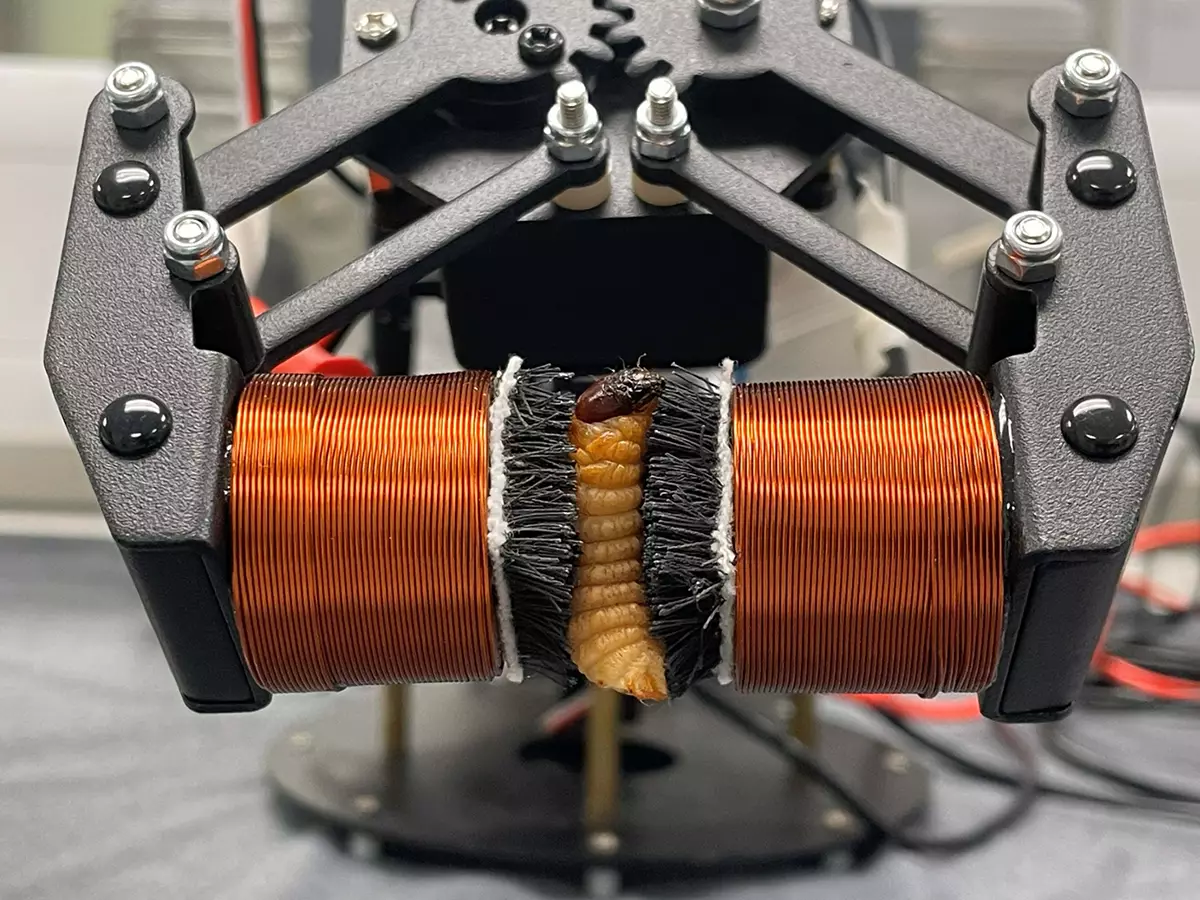
研究團隊開發的創新物料包括能通過電流控制剛度靈活抓起易碎或不規則形狀物品的柔性「靈巧抓」。
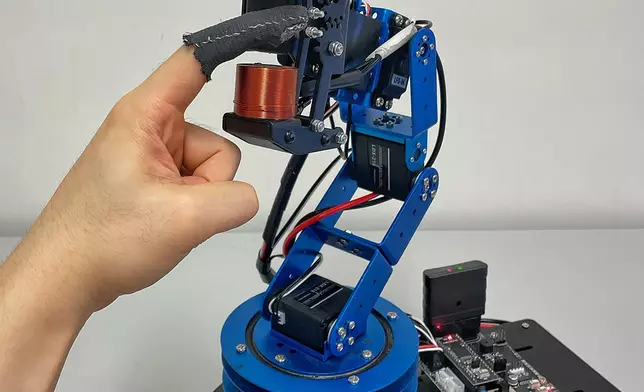
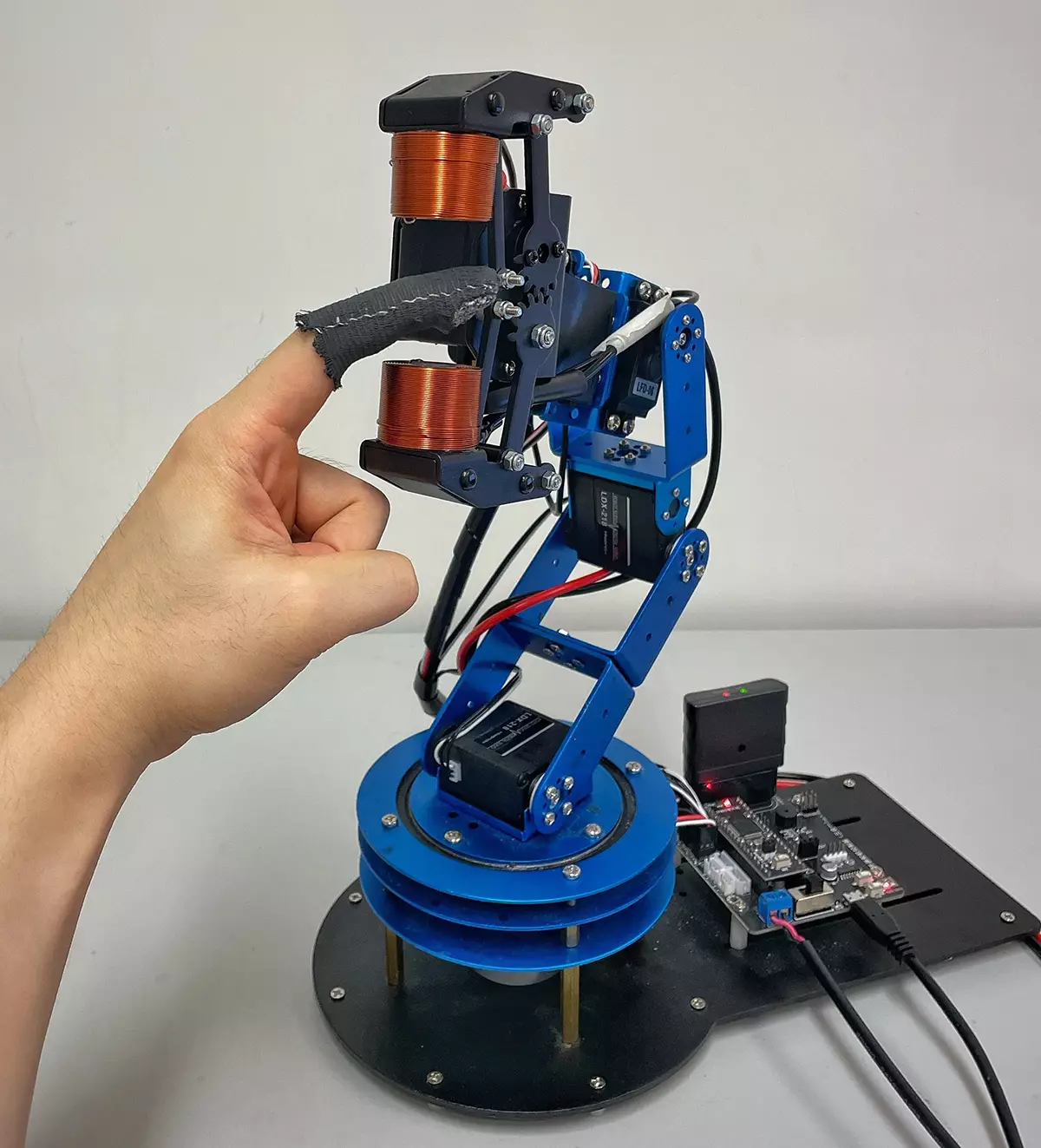
研究團隊開發的創新物料包括可精準模擬不同物體的表面紋理與觸感硬度的遙距仿真手感指套。
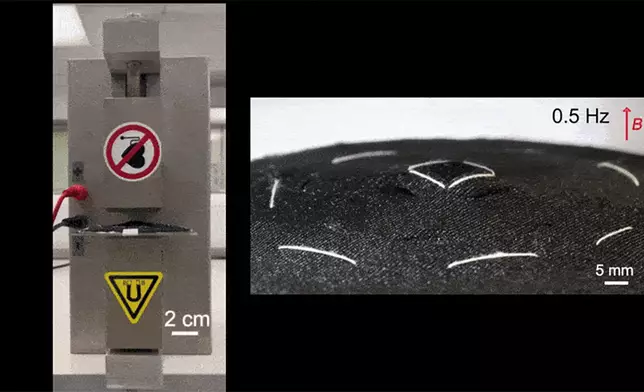
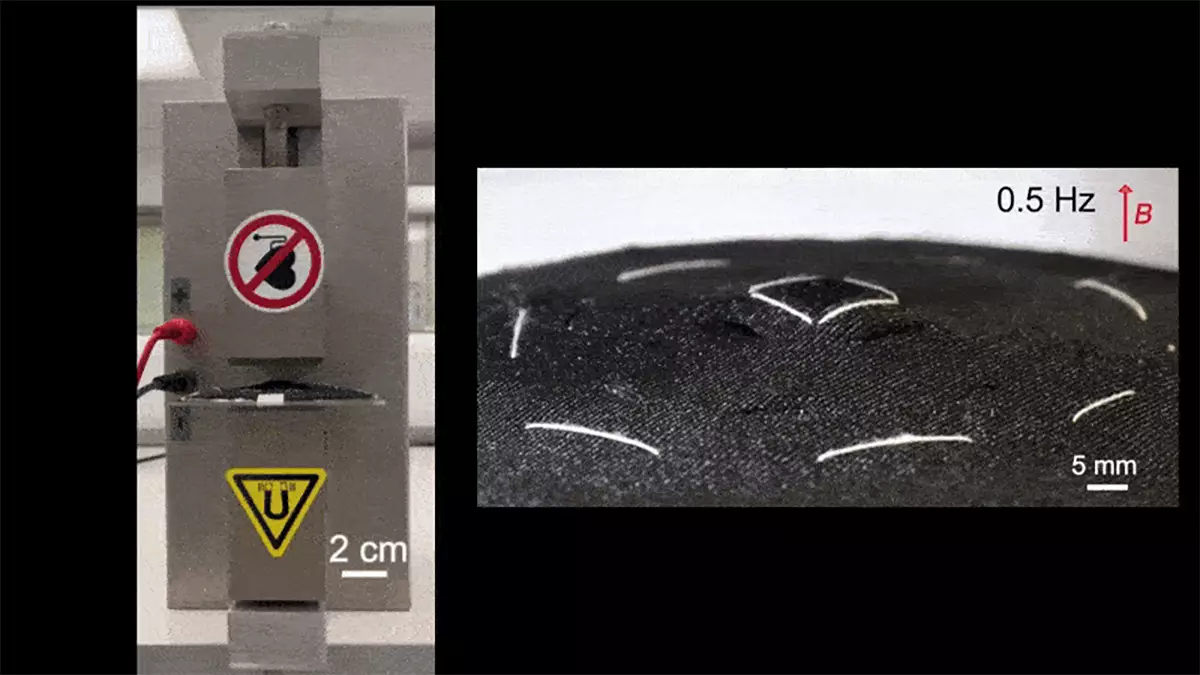
研究團隊開發的創新物料包括通過電控磁場驅動纖維結構變形實現透氣量智能調節的主動通風調溫織物。
香港理工大學陶肖明教授(左)及蒲俊宏博士(右)帶領的研究團隊研發可在人體安全磁場下靈活變形並調控機械特性的柔軟磁流變紡織品
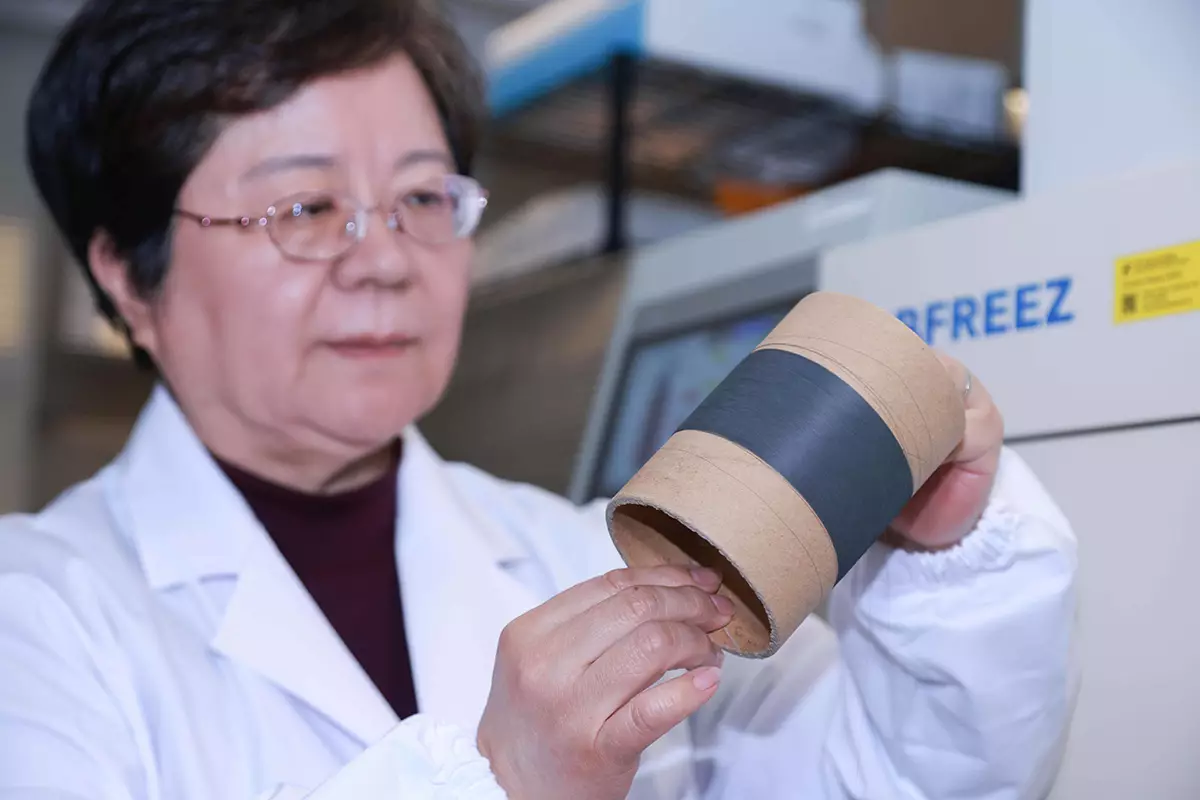
科研團隊創新研製的軟磁聚合物複合纖維,直徑僅 57 微米,通過在塑膠物料 (低密度聚乙烯基質) 中均勻分散磁粉,不僅實現低強度磁場下的精準控制,更解決磁粉沉重問題,又可進一步編織成紗線、多層面料,實現大面積可控變形。該突破性研究獲研資局「2024/25 年度主題研究計劃」資助 6,237 萬港元,並已於國際期刊《自然》上發表,題為「矢量刺激響應的磁流變纖維材料」。

研究團隊利用這種具備獨特方向性可控反應能力的嶄新纖維開發了多種創新物料。
不同於傳統僅對電壓、電流、溫度等「標量刺激」反應的智能材料,團隊研發的磁流變紡織品具備獨特的方向性可控反應能力,三大創新物料包括:
研究團隊開發的創新物料包括能通過電流控制剛度靈活抓起易碎或不規則形狀物品的柔性「靈巧抓」。
• 柔性「靈巧抓」: 通過電流控制剛度,可如人類手指般靈活抓起易碎、豆腐、藍莓、綠豆糕、薯片和螺旋面等軟質、易碎或不規則形狀物品,大輻降低操作過程中的損壞或變形風險。
研究團隊開發的創新物料包括可精準模擬不同物體的表面紋理與觸感硬度的遙距仿真手感指套。
• 遙距仿真手感指套: 全織物材可精準模擬不同物體的表面紋理與觸感硬度,佩戴更輕便舒適,適用於遠程手術培訓、中風康復訓練、虛擬試衣等多元場景,彌補市面同類觸覺手套普遍存在過大和過重的不足。
研究團隊開發的創新物料包括通過電控磁場驅動纖維結構變形實現透氣量智能調節的主動通風調溫織物。
• 主動通風調溫織物: 針對紡織服裝的濕熱管理痛點,通過電控磁場驅動纖維結構變形,實現透氣量智能調節,顯著提升穿戴溫濕舒適度。
談及技術創新性,陶肖明教授解釋:「本研究的關鍵突破在於首次將傳統剛性磁性裝置轉化為柔性替代品,更可延伸至硬磁性纖維材料研發,為新一代柔性機械人、電磁裝置及可穿戴技術的研發奠定基礎。」
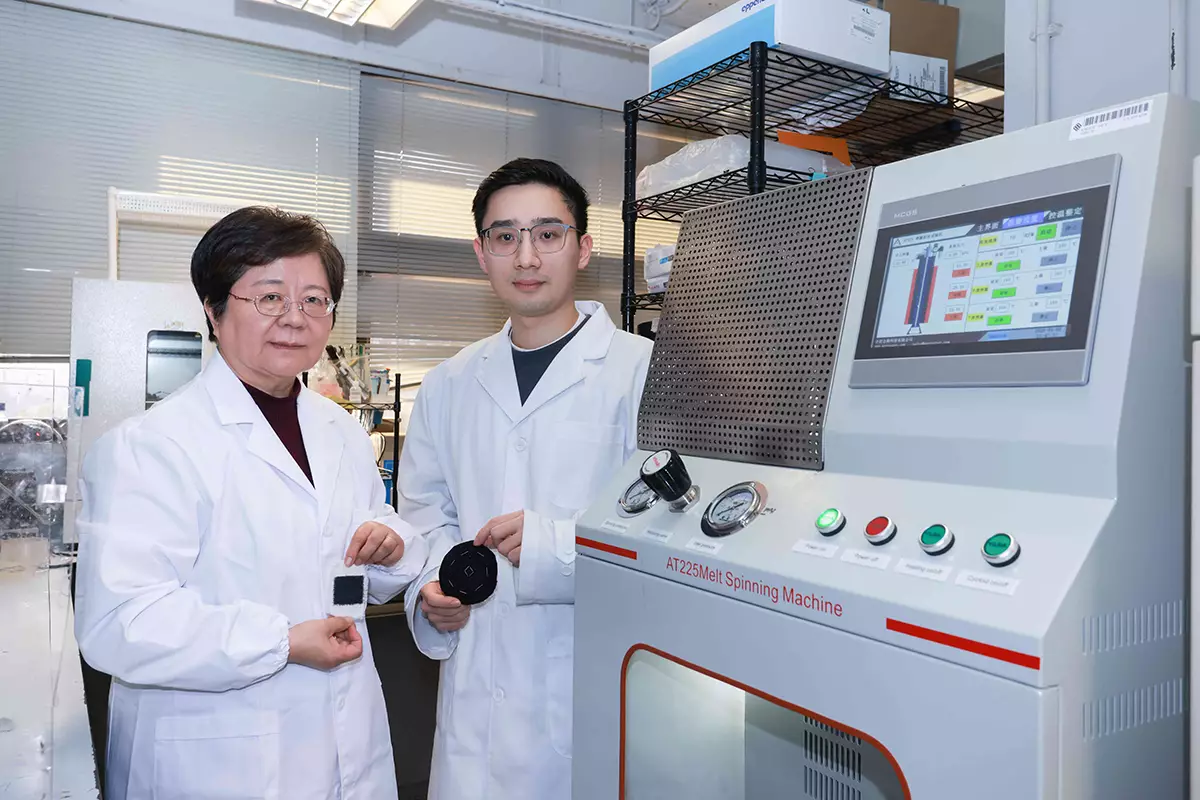
對於產業化前景,團隊成員、時裝及紡織學院助理教授(研究)蒲俊宏博士補充:「從原材料選擇到處理工藝,我們都考慮了產業化需求,採用已實現大規模量產的商品級原料,且處理工藝成熟,為技術快速落地食品生產、醫療康復、元宇宙交互等領域應用奠下基礎。」
陝西,是華夏文明的千年沃土,是中國革命的紅色搖籃,亦是今日科技創新的烽火台。為深化青年對國家的認識,香港理工大學(理大)於5月23日至29日,舉辦首屆愛國主義教育研習營,組織師生赴西安、延安進行7天研習考察。
師生走訪楊家嶺革命舊址、寶塔山、魯迅藝術文學院舊址等地,在追尋歷史脈絡的同時,通過親身體驗與交流,共同探尋「我們從何而來」與「未來應向何處去」的答案。

香港理工大學舉辦首屆愛國主義教育研習營,校董會主席林大輝博士和副校長(教學)曹建農教授,帶領近50位師生赴西安、延安進行7天研習考察。理大供圖
黃帝陵前尋根 明確「我們從何而來」
理大醫療科技及資訊學系三年級生施采瑤坦言,以往到內地多為旅遊觀光,以品嚐美食、探訪名店為主,鮮有機會追溯民族的起源。而「我們從何而來」這個問題,在她於黃帝陵祭祖、手持清香時,找到了答案。
她描述,當時聽著導遊講述華夏文明的源流,對「根」的體認變得無比強烈,這不僅是理性的認知,更是深刻的情感觸動,「我首次真切地感受到,自己與這片古老的土地是血脈相連的。」

研習團走訪黃帝陵,參與莊嚴祭祖儀式,溯源中華五千年文明根脈。理大供圖
實境演出感悟長征精神
理大航空及民航工程學系三年級生鄧天恩亦表示,過去對延安的認識僅停留在歷史課本。直至觀看《再回延安》實境演出,她才真正身歷其境地感受到當年紅軍的艱辛歷程。
演出中,一名年輕戰士在風雪中跌倒,身旁戰友毫不猶豫伸手攙扶,眾人相依前行的場景,讓她深受觸動,「唯有親眼看見,才體會到前行者與常人一樣,會恐懼、會疲憊。」但正因他們懷着堅定的信念,才能在絕境中持續前行。她強調,「何以能夠堅持」遠比「走了多遠」更震撼人心。

鄧天恩(右二)表示觀看《再回延安》實境演出,能身歷其境地感受當年紅軍的艱辛歷程。理大供圖
長征精神啟示香港青年積極建設國家
鄧天恩指出,長征精神對當代香港青年具有深遠的啟示意義。她觀察到,身邊許多同齡人常因學業競爭與就業前景感到焦慮,甚至懷疑努力的價值。她認為,面對壓力時,與其糾結困難有多大,不如反思自身目標與信念的份量。「當我們理解到,今日的努力是為了超越自我、服務社會、貢獻國家,這種內生的使命感,將比任何外在激勵都更有力量。」
施采瑤亦建議,香港青年具備熟悉國際規則、了解內地發展的雙重優勢,不應只滿足於做旁觀者或受益者,而應成為連接內地與世界的橋樑,成為國家發展的實際貢獻者。

學生到訪秦始皇帝陵博物院、西安城牆等歷史文化地標,親身感受華夏文明的深厚底蘊。 理大供圖
立足崗位實踐「有價值」的人生
從當年的艱苦歲月,到如今國產C919翱翔天際、原研創新藥屢屢突破,這條從無到有的奮進之路,凝聚著一代代人的堅持與犧牲,而此行亦讓兩位同學找到了清晰的就業方向。
參觀西安交通大學西遷博物館後,鄧天恩表示,儘管當年條件艱苦,但無論是戰士、醫生還是文藝工作者都立足崗位,以實際行動作出貢獻。過去她認為只有從事飛機設計或前沿研發才算「有貢獻」、「有價值」。然而,在長征歲月裡,並非人人皆是開路先鋒。每一位在後方確保隊伍前行的支援者,同樣不可或缺。她願成為航空事業中的「守護者」,在國家發展的新征程上,以專業與責任護衛每一架飛機的安全起降。

研習團參觀秦創原.陝西科技創新平台。理大供圖
哪裡有事業,哪裡有愛,哪裡就是家
施采瑤坦言,以往選擇醫療影像專業時,多考慮工作穩定;但了解到前輩心懷「哪裡有事業,哪裡有愛,哪裡就是家」的信念、攜家帶口紮根西部時,她如當頭棒喝,開始思考自己如何為國家作出貢獻。
她表示,原本計劃把獎學金用於赴英國或歐洲實習,但陝西之行後,她決定前往北京協和醫院、北京大學國際醫院等地,進行前沿醫療影像研究與實習,「未來視野將不局限於香港,要更多走入大灣區、走向國家更廣闊的舞台,實現學以致用。」

理大校董會主席林大輝博士,寄語學生畢業後在發展個人事業的同時,要融入國家發展大局。理大供圖
一趟旅程重塑人生
理大一直堅持以立德樹人、愛國育才為核心,是香港首間將《中國歷史與文化》列為全體本科生必修課程的大學,亦成立中國歷史與文化研究中心,深耕中華文化教學與研究。
作為研習營首屆參與者,鄧天恩感謝理大與西安交大的精心安排,並希望未來能有更多同學獲得類似的交流機會。她建議,未來的研習活動可加強兩地學生互動,增加與專業相關的實踐體驗。
施采瑤亦鼓勵香港青年多留意相關交流機會,「這不只是了解歷史,更是擴展人脈、認識新事物的機會。」

施采瑤建議,未來的研習活動可加強兩地學生互動。理大供圖
林大輝博士強調:「『愛國』是我們作為中國人應有的責任、態度、義務和使命,是理所當然的事情。但『愛國』不能空談,也不能只留在情感上的表達。『愛國』是要參與、要行動、要投入,也要肯奉獻、肯付出、肯犧牲。」他並寄語同學返港後,向身邊親友和同學分享此行見聞,講好中國故事、香港故事、理大故事和西安交通大學故事。