杜克大學正在研發的一款機械人,已準備好隨時應對任何方向的世界。
工程學教授陳博遠及其團隊,並非嘗試透過建造外形像人類、狗或昆蟲的機械人來模仿自然界的對稱形狀,而是專注於動作的統一性,即他所稱的「動態對稱」。
點擊看圖輯
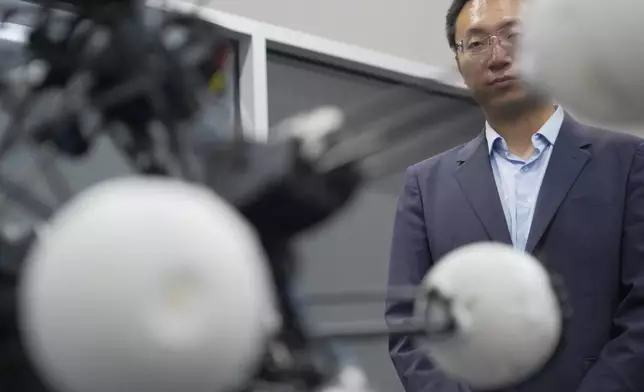
周二(2026年5月26日),陳博遠教授在北卡羅來納州達勒姆的杜克大學通用機械人實驗室,觀察名為「阿格斯」的機械人伸縮。 (美聯社圖片/Allen G. Breed) AP圖片

周二(2026年5月26日),陳博遠教授在北卡羅來納州達勒姆的杜克大學通用機械人實驗室,透過玻璃櫃觀察一個人形機械人,其身影亦倒映在玻璃上。 (美聯社圖片/Allen G. Breed) AP圖片

周二(2026年5月26日),陳博遠教授在北卡羅來納州達勒姆的杜克大學通用機械人實驗室,指向一個人形機械人。 (美聯社圖片/Allen G. Breed) AP圖片
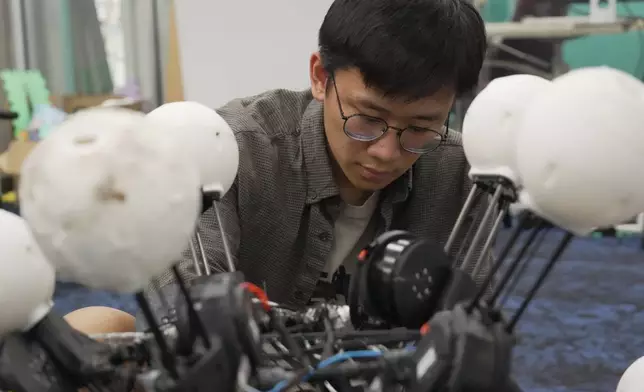
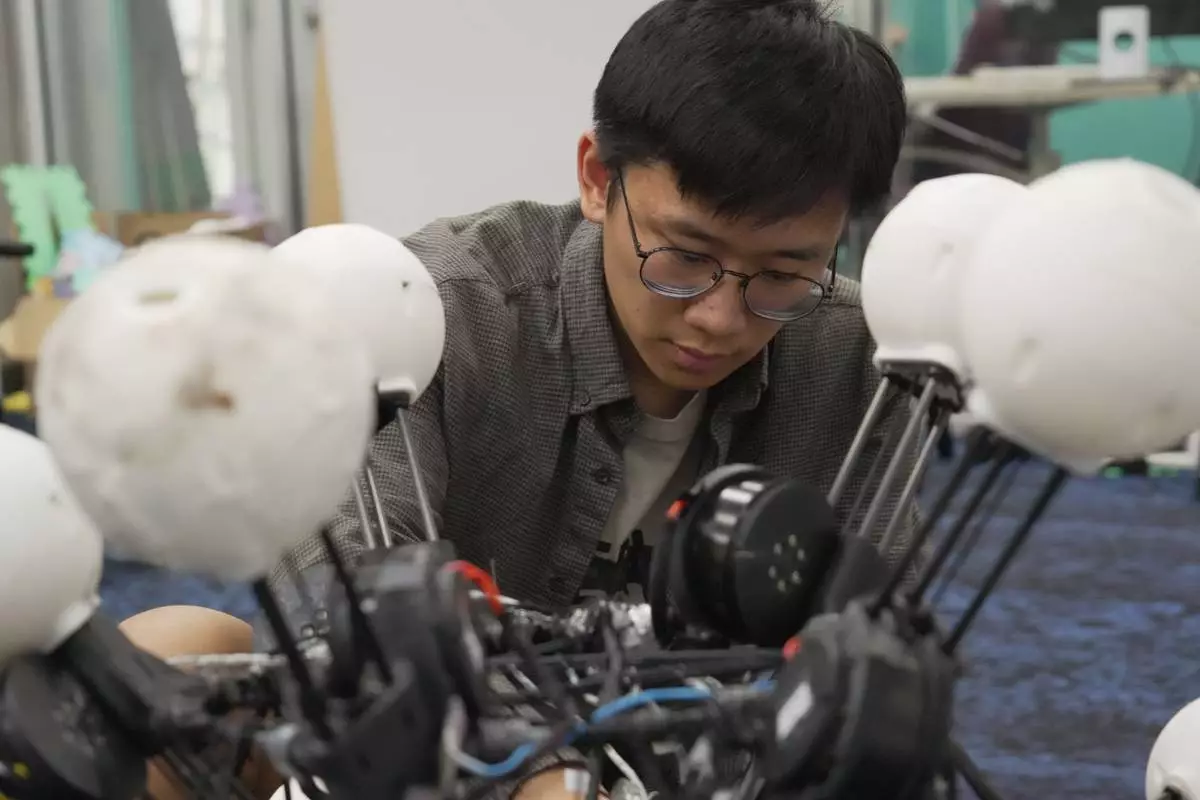
周二(2026年5月26日),博士生劉佳勳在北卡羅來納州達勒姆的杜克大學通用機械人實驗室,操作名為「阿格斯」的機械人。 (美聯社圖片/Allen G. Breed) AP圖片

周二(2026年5月26日),博士生劉佳勳在北卡羅來納州達勒姆的杜克大學通用機械人實驗室,操作名為「阿格斯」的機械人。 (美聯社圖片/Allen G. Breed) AP圖片
周二(2026年5月26日),陳博遠教授在北卡羅來納州達勒姆的杜克大學通用機械人實驗室,觀察名為「阿格斯」的機械人伸縮。 (美聯社圖片/Allen G. Breed) AP圖片
成果就是「阿格斯」(Argus)。這款圓滾滾的機械人以希臘神話中擁有多隻眼睛的巨人命名,其20條伸縮腿從中央核心向外伸展,每條腿都配備深度感應鏡頭。由於沒有前後、上下之分,它能夠即時向任何方向觀察及移動。
陳博遠表示:「我們並非量度機械人腿部如何圍繞身體不同部位排列,而是量度它能以多快速度向任何方向移動。」他續指:「誰說,如果機械人要以最有效方式協助我們,就必須長得像我們?」

周二(2026年5月26日),陳博遠教授在北卡羅來納州達勒姆的杜克大學通用機械人實驗室,透過玻璃櫃觀察一個人形機械人,其身影亦倒映在玻璃上。 (美聯社圖片/Allen G. Breed) AP圖片
實驗顯示,「阿格斯」能夠在沙灘及森林灌木叢中穿梭,滾過障礙物,並在被推動後自行穩定。它亦能透過腿部交替支撐及推動,攀爬平行磚牆之間。即使一個或多個摩打失靈或一條腿斷裂,它仍能繼續運作。
研究生兼《科學機械人學》期刊周三刊登的「阿格斯」研究報告合著者劉佳勳表示:「觀察『阿格斯』移動,與我們曾合作過的任何其他機械人截然不同。」他續指:「我們首次看到它在樹木及崎嶇地形中穿梭,即使在嚴重碰撞下,我們就知道這是一個與別不同的東西。」

周二(2026年5月26日),陳博遠教授在北卡羅來納州達勒姆的杜克大學通用機械人實驗室,指向一個人形機械人。 (美聯社圖片/Allen G. Breed) AP圖片
作為研究一部分,研究人員開發了一項名為「動態各向同性」(dynamic isotropy)的新設計原則,根據機械人能以多均勻的速度向各方向加速,將其評分定於0至1之間。現時大部分機械人,包括人形機械人及無人機,得分均低於0.6。「阿格斯」則取得0.91分。
陳博遠表示:「當機械人能夠在每個方向上均勻加速時,它就不再需要以任何特定方式面對世界。」他希望這項原則能引導搜救機械人、水下或空中飛行器,以及具備抓取物件能力的機械人發展。
周二(2026年5月26日),博士生劉佳勳在北卡羅來納州達勒姆的杜克大學通用機械人實驗室,操作名為「阿格斯」的機械人。 (美聯社圖片/Allen G. Breed) AP圖片
他指出:「與其建造一個看起來像人類手部的機械人手部……其中一個想法是將『阿格斯』本身視為手部,它能夠向任何方向操控物件。」他補充:「我們能傳遞給世界的知識,遠比建造現有機械人或複製現有物種更為深入。」

周二(2026年5月26日),博士生劉佳勳在北卡羅來納州達勒姆的杜克大學通用機械人實驗室,操作名為「阿格斯」的機械人。 (美聯社圖片/Allen G. Breed) AP圖片
(美聯社)